 みらいぶっくグループ
みらいぶっくグループ
第86回情報処理学会全国大会 第6回中高生情報学研究コンテスト
人工知能と人間のよりスムーズなコミュニケーションを目指して
玉川学園高等部 (東京都)
チーム名:玉川学園サイエンスクラブ協調作業班
國吉仁志くん(2年)
(2024年3月取材)
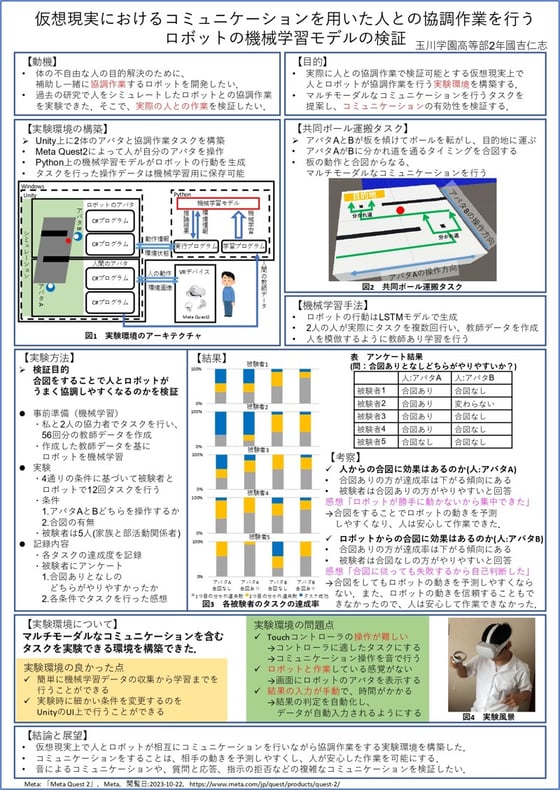
仮想現実におけるコミュニケーションを用いた人との協調作業を行うロボットの機械学習モデルの検証
私は人と協調作業をするロボットの開発を目標としている。ロボットが様々な人の動きに対応するためには、コミュニケーションをとることが重要である。一昨年の私の研究ではロボットの動作、コミュニケーションの生成をRNNで行い、シミュレーションにおいてロボットがコミュニケーションをとることで、うまく人と協調作業することが確認できた。
本研究では、一昨年の研究の機械学習モデルを発展させて、実際に人との協調作業で検証するために、Unityで構築した仮想現実上で人がMeta Quest2を用いてロボットと協調する共同ボール運搬タスクを提案する。
共同ボール運搬タスクは、人とロボットが板を動かし、板上のボールを正しい経路で転がすタスクである。ロボットは人の動きとコミュニケーションを教師として学習する。このタスクにおいて、コミュニケーションにより人の動きにロボットがより良く対応できるか検証する。
※クリックすると拡大します
■今回発表した研究を始めた理由や経緯を教えてください。
中学3年生の時に「情報科学の達人」という育成プログラムに参加し、グラフ理論、最適化問題など、情報科学の様々な研究分野を学ぶ機会を頂きました。
その中で、ロボットが機械学習によって人の指示を解釈して動くという研究に興味を持ち、人と対等に動くロボットを作りたいと考えて、人とロボットの協調作業というテーマで研究を始めました。
■今回の研究にかかった時間はどのくらいですか。
「人とロボットの協調作業」の研究は、中学3年から高校2年までの3年弱です。今年発表した研究は、2023年7月に、VR空間で実験を行うというアドバイスを玉川大学の稲邑哲也教授に頂いて始めたものなので、5か月になります。
■今回の研究ではどんなことに苦労しましたか。
今回の研究では、被験者に協力してもらって実験しました。一人で実験するときは自分のペースで進められるのですが、被験者がいるので、しっかり説明をしたり、スムーズに進むように準備をしたりと普段しない実験の手順だったので大変でした。
また、アンケートを行い、そこから考察するというのも初めての経験で、何を基準にすればいいのかと悩むことも多かったです。
■「ココは工夫した!」「ココを見てほしい」という点を教えてください。
ゲームエンジンのUnity上で実験を行ったのですが、被験者の待ち時間が少なくなるよう条件の設定を簡単な操作で変更できるように工夫しました。
また、ロボットのニューラルネットワークの入力には、分かれ道で左右どちらに進むかの情報、毎フレームの板・ボールの情報、合図のタイミングの情報という異なる種類のデータがあり、同じようには処理できません。
そこで、機械学習モデルにはLSTMを用い、分かれ道の情報は初期状態として入力し、合図の情報と板・ボールの情報はニューラルネットワークを分けて別々で処理する、というような工夫を行いました。
■今後「こんなものを作ってみたい!」「こんな研究をしてみたい」と思うことがあれば教えてください。
機械学習を用いた研究をしてきましたが、今は人工生命の研究にも興味を持っています。機械学習は単純な最適化を行いますが、複数の個体が相互作用によってどのような知能を獲得できるのかを研究してみたいです。
※玉川学園サイエンスクラブ協調作業班チームの発表は、中高生研究賞奨励賞・情報処理教育委員会 委員長賞を受賞しました。







