 みらいぶっくグループ
みらいぶっくグループ
第86回情報処理学会全国大会 第6回中高生情報学研究コンテスト
事故防止アプリと自動ブレーキを連動して、出会い頭事故を回避する
群馬県立前橋高等学校
チーム名 :トマールくん×マモールくん
猪熊蓮音くん、大嶋輝希くん、湯澤拓哉くん、金澤侑一郎くん(2年生)
(2024年3月取材)
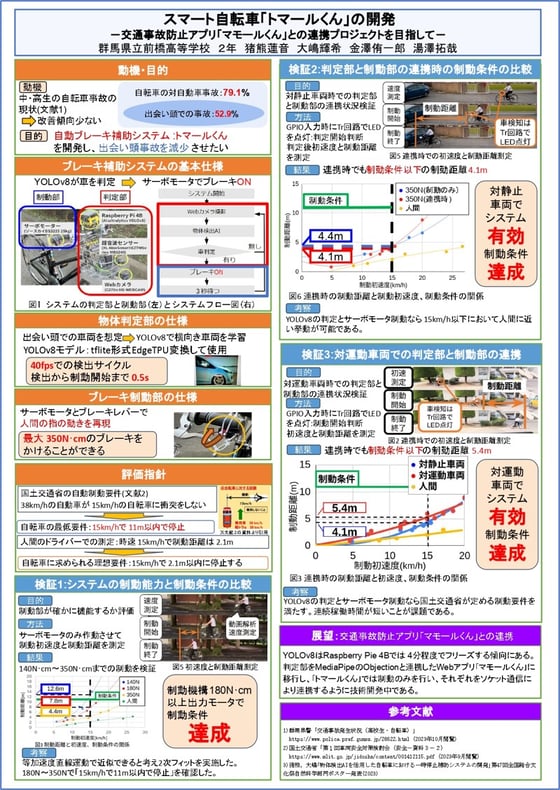
スマート自転車「トマールくん」の開発-交通事故防止アプリ「マモールくん」との連携プロジェクトを目指して―
自転車・自動車事故の現状を踏まえ、見えない危険を意識しながら見える危険も随時回避できる自転車に取付可能なブレーキ補助システム「トマールくん」、及びモバイル端末からアクセス可能な交通事故防止Webアプリ「マモールくん」を開発した。
「トマールくん」の仕様は、物体検出AIによって自動車が判定されると、サーボモータによってブレーキレバーが引かれるというものである。静止している自動車に対する検証では、システムが人間と同等のオーダーで判定し、自動ブレーキ制動することに成功した。
また、「マモールくん」の仕様は、アプリを起動していると、クラウド上で蓄積された急ブレーキ発生地点(危険地点)に車両が近づいた際に、警告を発し安全運転を促すものである。
さらに、「トマールくん」とソケット通信を行うことができ、急ブレーキ発生地点において自動ブレーキ制御をかけることにも成功している。
※クリックすると拡大します
■今回発表した研究を始めた理由や経緯を教えてください。
群馬県の高校生の自転車事故発生件数は9年間連続全国ワースト1位であり、群馬県の中高生の自転車事故の現状としては、対自動車での自転車事故が88%を占めています。その内61%は、出会い頭での事故との報告があります。
群馬県では平成27年から令和2年まで、群馬県交通安全教育アクション・プログラムを行っていますが、まだ改善の余地があるのが実情です。
これは全国でも同じ傾向があるので群馬県内だけの問題ではないと考えました。そこで、マナーアップ運動や交通安全講演会のような啓発活動だけではなく中高生の自転車のブレーキを直接制御する具体的な対策が必要だと考え、この研究に至りました。
また、メンバーの猪熊くんが中学生のときに出会い頭での自転車事故に巻き込まれたという実体験から、自転車事故がより一層身近な問題であると感じ、この問題を解決したいという気持ちが強かったからです。
■今回の研究にかかった時間はどのくらいですか。
この研究がスタートしたのは自分たちが高校1年生のときの5月なので、関東ブロック大会の時点では1年7か月程度研究をしていました。
実用化に向けて現在進行形で研究が進んでいるので2年程度この研究をしていることになります。
■今回の研究ではどんなことに苦労しましたか。
出会い頭事故を防止するために、車を判定するために有効にはたらく物体検出AIを探すのに苦労しました。
今回は物体検出AIであるYOLOv8を使用して、交差点に進入してきた車を判定していますが、YOLOv8にたどり着くまでに3種類の物体検出AIで検証・開発を行ってきました。
YOLOv8以外の物体検出AIでは、いずれも判定してブレーキをかけるときには自転車が交差点に進入してしまっているような制動距離の測定結果であったため、システムが出会い頭事故を防止するために有効にはたらいているとはいえませんでした。
YOLOv8を活用したシステムでは、交差点に進入する前に制動できる測定結果を得ることができ、出会い頭事故を防止するために車を判定するために有効にはたらく自動ブレーキシステムに一歩近づくことができました。
また、人間と同等の力でブレーキレバーを引くことができる制動機構を探すのに苦労しました。はじめは、プルソレノイドの鉄心を引き込む動きを利用した制動機構を採用していたのですが、引き込む力が弱かったため、交差点に進入する前に停止することができませんでした。
今回の研究では、自転車にブレーキをかける方法として、サーボモータと呼ばれるロボットの関節によく使われるモータを自転車のハンドル部分に取り付け、アームの回転運動によって人間がブレーキレバーを引く動きを再現することで、実際にブレーキをかけて自転車を制動させることができました。
■「ココは工夫した!」「ココを見てほしい」という点を教えてください。
今回の研究では、交差点での車との出会い頭事故の状況を想定して、横から撮影された車の画像を500枚程度集め、車の前半分の側面の部分を手動で500回ほど選択して、情報タグを追加することで教師データを作成し、Google Colaboratory上で機械学習を行うことでオリジナルのモデルセットを作成しようと工夫しました。
また、制動部では、車を判定すると距離に構わずブレーキがかかってしまい、必要以上に一時停止をさせられてしまい、ユーザーに好まれず使用してもらえないため、出会い頭事故を防止するという目的を達成するための有効なシステムであるとは言えませんでした。
そこで、超音波センサーを使用して距離データを制動装置の作動条件に加えることで、距離に応じてブレーキの強さを調整し、本当にブレーキが必要な場面に適切な強さでブレーキをかけることができるように工夫しました。
他にも、本システムはRaspberry Pie 4BやWebカメラ、サーボモータなどの全ての部品を取り外すことができます。このシステムを使用することで、交差点に進入する際に一時停止をする習慣がついたら、システムを取り外して普通の自転車生活に戻ることが可能な矯正装置になるように工夫しました。
■今後「こんなものを作ってみたい!」「こんな研究をしてみたい」と思うことがあれば教えてください。
・トマールくんの実装手段としてのプログラミングは手を出しやすくて良かったです。
私はトマールくんの研究のように、先進技術を用いた今までになかったようなものづくりをしてみたいです。(猪熊くん)
・僕は主に判定部の開発に携わっていました。しかし、プログラミングを始めたのが高校1年生からというのもあり、機械学習を行う過程で発生したエラーメッセージの理解に時間がかかってしまい、判定部の開発が滞ることが多々ありました。今後もこの研究に携わる中で、トライアンドエラーを繰り返し、プログラミングを課題解決の手段として利用できるようにしていきたいです。(大嶋くん)
・私は主にトマールくんの制動部に関わっており、具体的にはサーボモータをプログラムで制御する技術を学びました。その経験を活かし、社会問題の解決につながるプロダクト系のデバイスを開発したいと考えています。(湯澤くん)
・私は主に制動部と判定部の統合や、エラーやバグの発生時に分析と解決を行ってきました。プログラミングが得意なので、トマールくんの開発の中でプログラムにおける困難な実装を実現してきました。私にとってプログラミングは自分の世界を広げる素晴らしい手段であると考えています。今後もその自由な世界で、人々の役に立つシステムを作ることに注力していきたいです。(金澤くん)
※トマールくん×マモールくんチームの発表は、中高生研究賞優秀賞を受賞しました。







